Studium - Remotely Controlled Robot
|
Dies ist ein Projekt ausgerichtet unter Zusammenarbeit der FH München und der Kwantlen University College, Vancouver. |
Wir haben uns also daran gemacht im Team eine Kontrollsoftware zu erstellen, welche den Roboter steuert. Diese Kontrollsoftware läuft lokal (auf der "Erde").
Dieser Kurs ist teil des EU-Canadian Consortium on Computer Networks and Network Security Studies und wird von Studentengruppen auf beiden Seiten (München und Kanada) ausgeführt. Dies bedeutet, dass beide Gruppen einen Roboter konstruieren und auch die Kontrollsoftware erstellen. Die Kanadier steuern den Roboter hier in München mittels ihrer Kontrollsoftware in Vancouver. Die deutsche Gruppe steuert den Roboter in Vancouver von München aus.
Die Hauptziele waren:
- Diskussion und Übereinstimmung über grundlegende technische Voraussetzungen
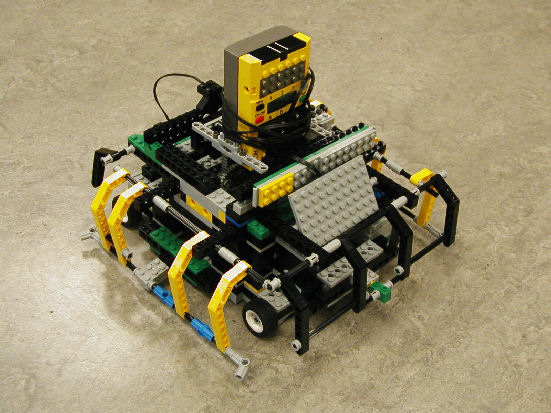
- Design und Implementierung eines mobilen Roboters, welcher via Netzwerk und TCP/IP kontrolliert werden kann
- Design und Implementierung der Kontrollsoftware, welche die Sensorwerte des Roboters berücksichtigt, Aktionen automatisch plant und Kommandos an den Roboter schickt
Downloads:
Literatur:
- leJOS Project
- "Programming Lego Mindstorms with Java" von Giulio Ferrari u.a. (Syngress Media 2002 - ISBN 1928994555)
Veröffentlichungen:
Sueddeutsche Zeitung, 19.Januar 2005, Seite 41
 |
 |
 |